PRODUKT
 Aktueller Standort:Zuhause > Produkt > Standard-Bandaktuator > RMF-Serie > RMF14 > Motor rechts oben
Aktueller Standort:Zuhause > Produkt > Standard-Bandaktuator > RMF-Serie > RMF14 > Motor rechts oben 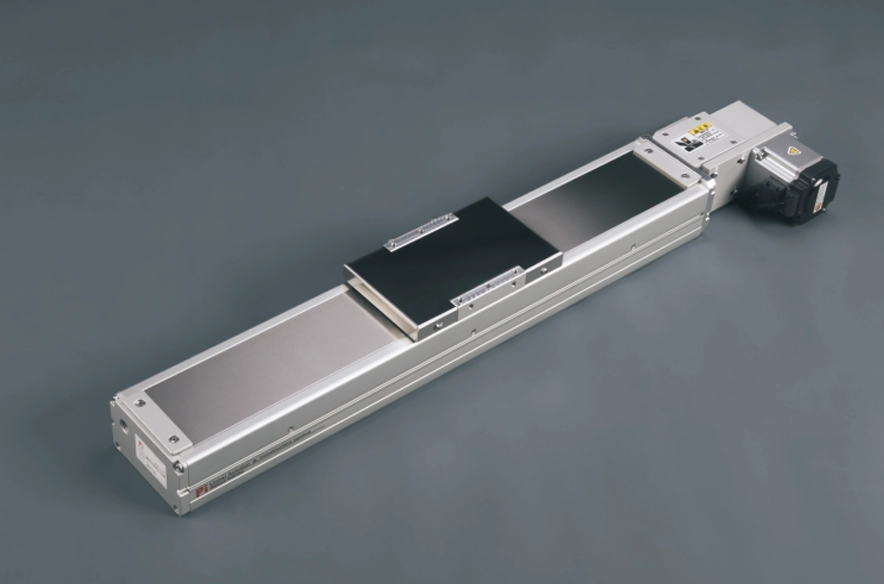
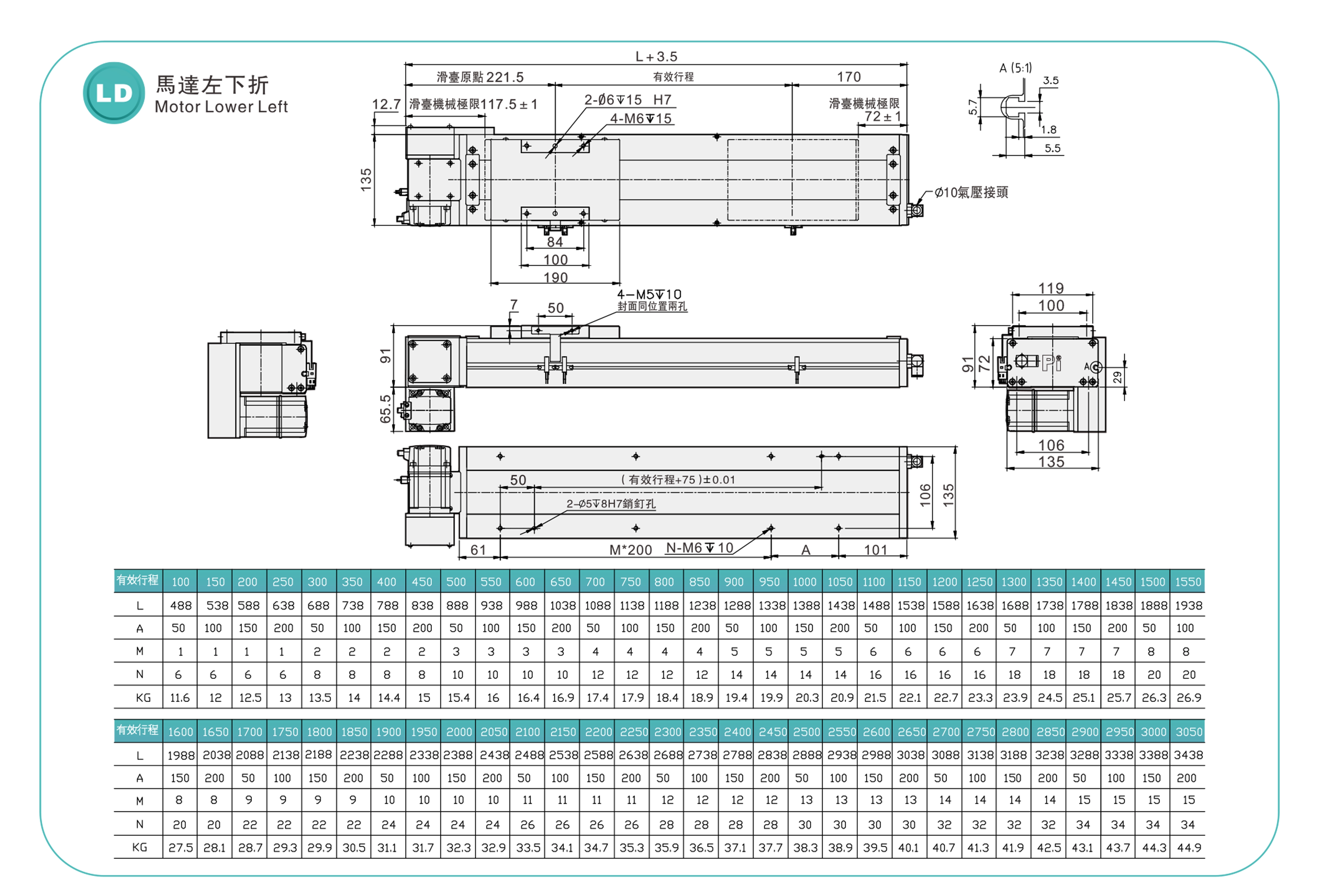
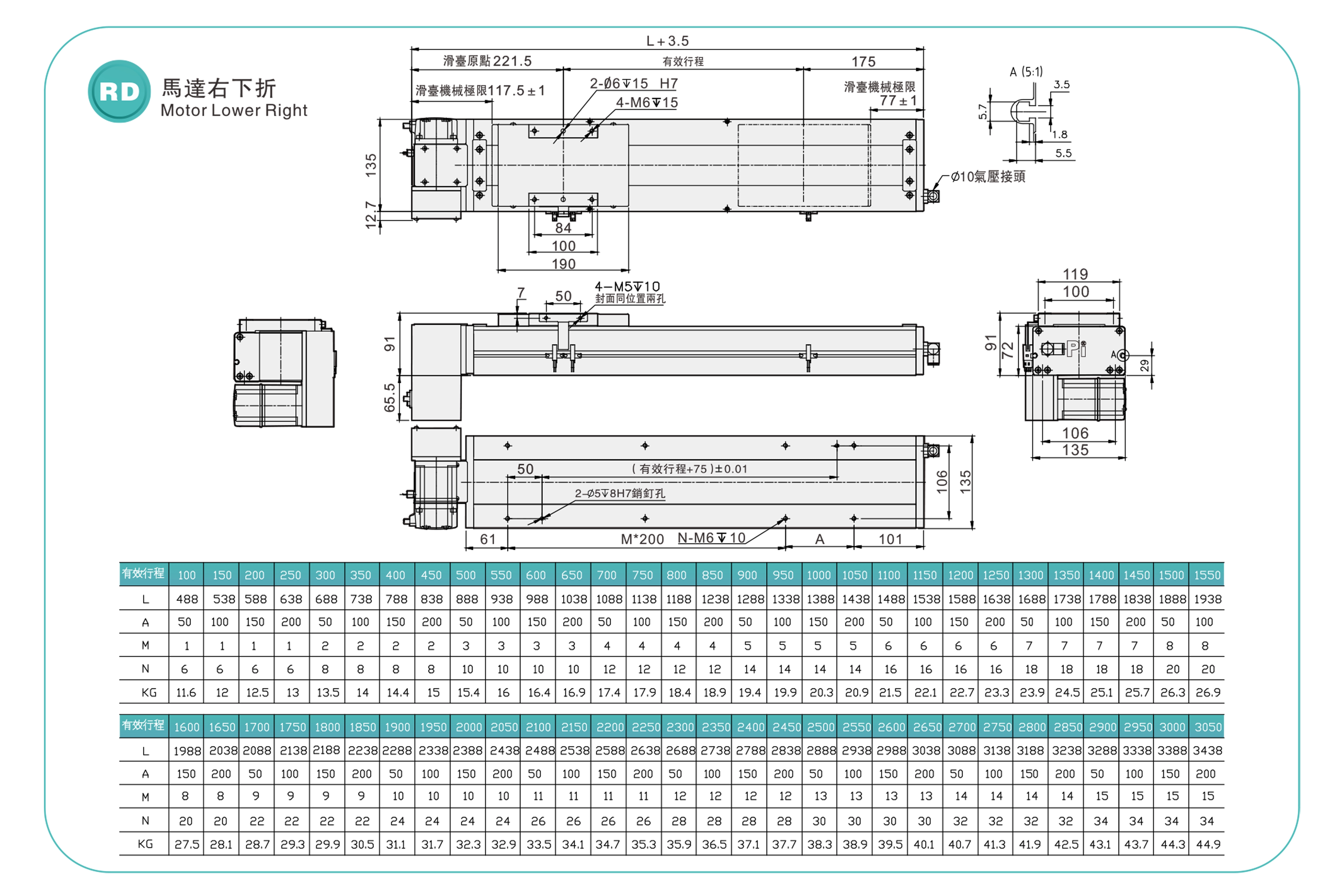
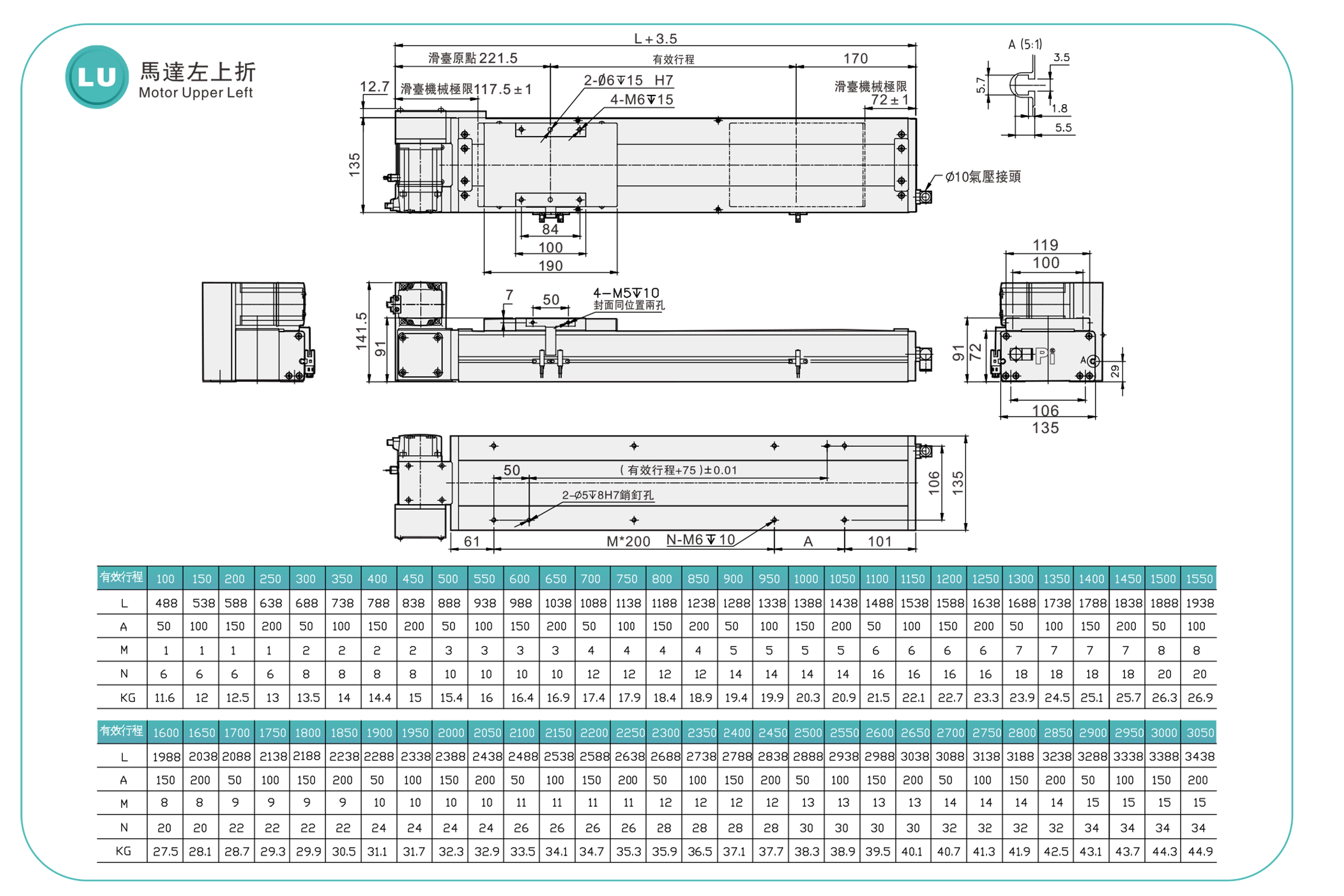
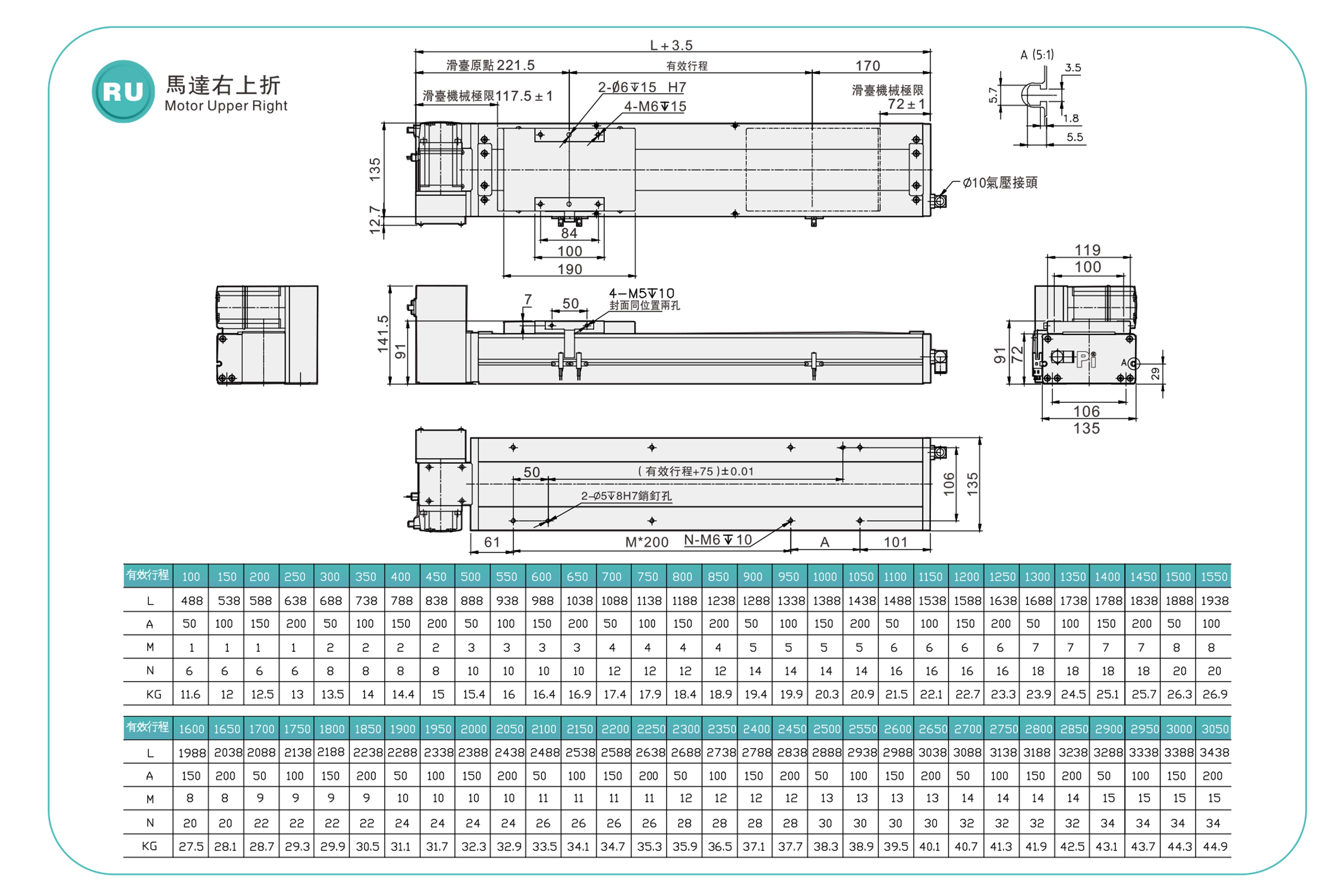
Wiederholgenauigkeit: ±0,04 mm
Horizontale Belastung: 25 kg
Leitung: 40 mm
Maximale Geschwindigkeit: 2000 mm/s
Hubabstand: 100–3050 mm
Stellen Sie die Motorbeschleunigung und -verzögerung auf 0,2 Sekunden ein.
Für den Einsatz von Umkehrkränen können die Normvorgaben nicht angewendet werden. Bei Bedarf kontaktieren Sie uns bitte telefonisch oder hinterlassen Sie online eine Nachricht.
Lieferzeit: 7-10 Tage



| Verwenden Sie Wo | Angetriebener Modus | Modellspezifikation | Reduziermechanismus | Motorleistung (w) | Breite (mm) | Wiederholbarkeit (mm) | Riemenspez | Maximale Nutzlast (kg) | Höchstgeschwindigkeit (mm/s) *1 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Riemenbreite (mm) | Steigung (mm) | Horizontal | Vertikal | ||||||||
| Standard | Gürtel | RMF14 | Ja | 200W | 135 | ±0,04 | 22 | 40 | 25 | - | 2000 |
| RMF17 | Ja | 400W | 170 | ±0,04 | 30 | 40 | 45 | - | 2000 | ||
| RMF22 | Ja | 750W | 220 | ±0,04 | 50 | 40 | 85 | - | 2000 | ||
| RMF28R | NEIN | 1000W | 280 | ±0,08 | 50 | 230 | 230 | - | 2000 | ||
| RMF28RN | NEIN | 1000W | 280 | ±0,08 | 50 | 230 | 200 | - | 2000 | ||
*1Die höchste Geschwindigkeit basiert auf der maximalen Drehzahl des Servomotors (3000).
*Die höchste Geschwindigkeit basiert auf der maximalen Drehzahl des Schrittmotors (500).
| Verwenden Sie Wo | Angetriebener Modus | Modellspezifikation | Reduziermechanismus | Motorleistung (w) | Breite (mm) | Wiederholbarkeit (mm) | Riemenspez | Maximale Nutzlast (kg) | Höchstgeschwindigkeit (mm/s) *1 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Riemenbreite (mm) | Steigung (mm) | Horizontal | Vertikal | ||||||||
| Standard | Gürtel | RMP14S | Ja | 200W | 135 | ±0,04 | 22 | 40 | 25 | - | 2000 |
| RMP17S | Ja | 400W | 170 | ±0,04 | 30 | 40 | 45 | - | 2000 | ||
| RMP22S | Ja | 750W | 220 | ±0,04 | 50 | 40 | 85 | - | 2000 | ||
| RMP28R | NEIN | 1000W | 280 | ±0,08 | 50 | 230 | 230 | - | 2000 | ||
| RMP28RN | NEIN | 1000W | 280 | ±0,08 | 50 | 230 | 200 | - | 2000 | ||
*1Die höchste Geschwindigkeit basiert auf der maximalen Drehzahl des Servomotors (3000).
*Die höchste Geschwindigkeit basiert auf der maximalen Drehzahl des Schrittmotors (500).
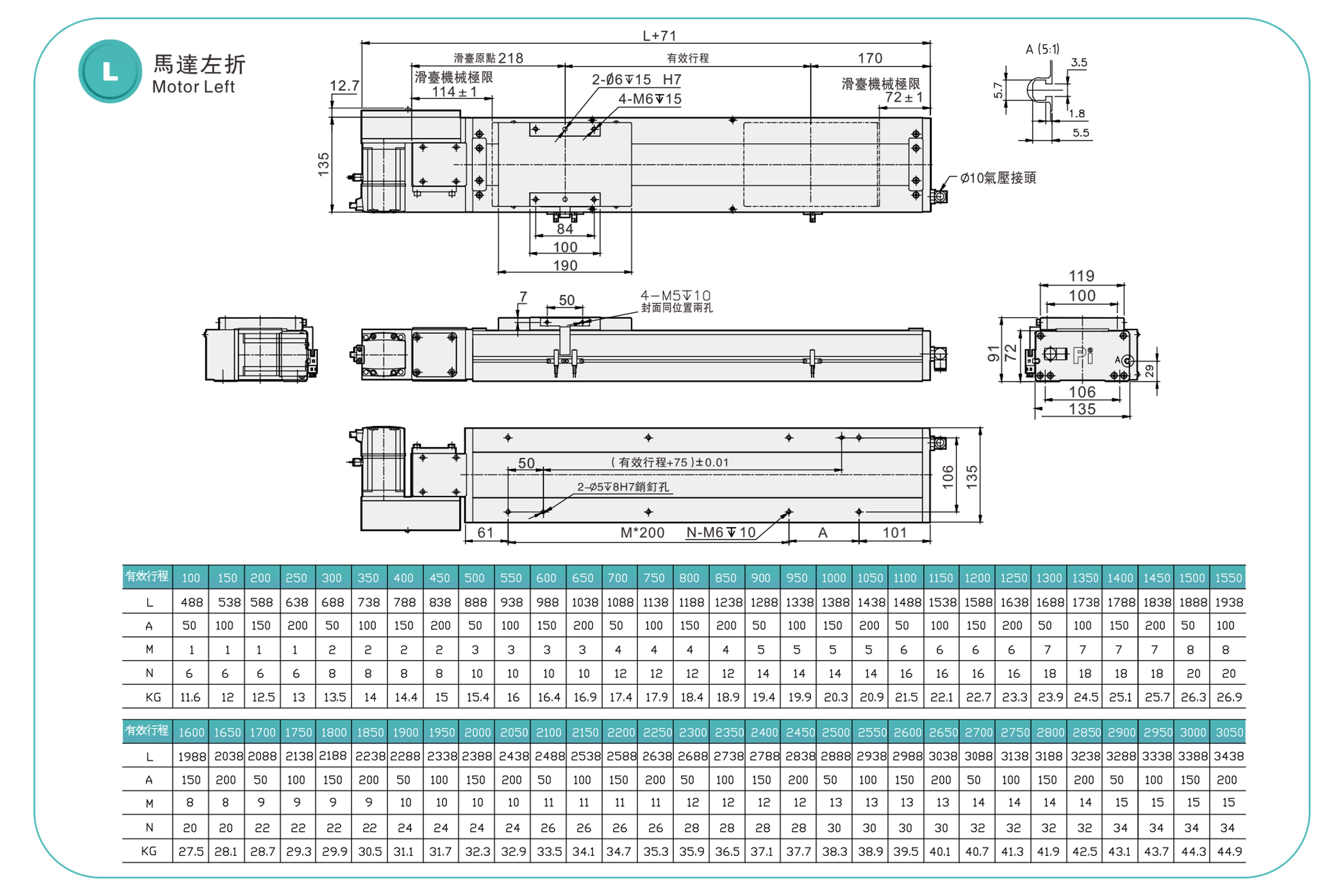
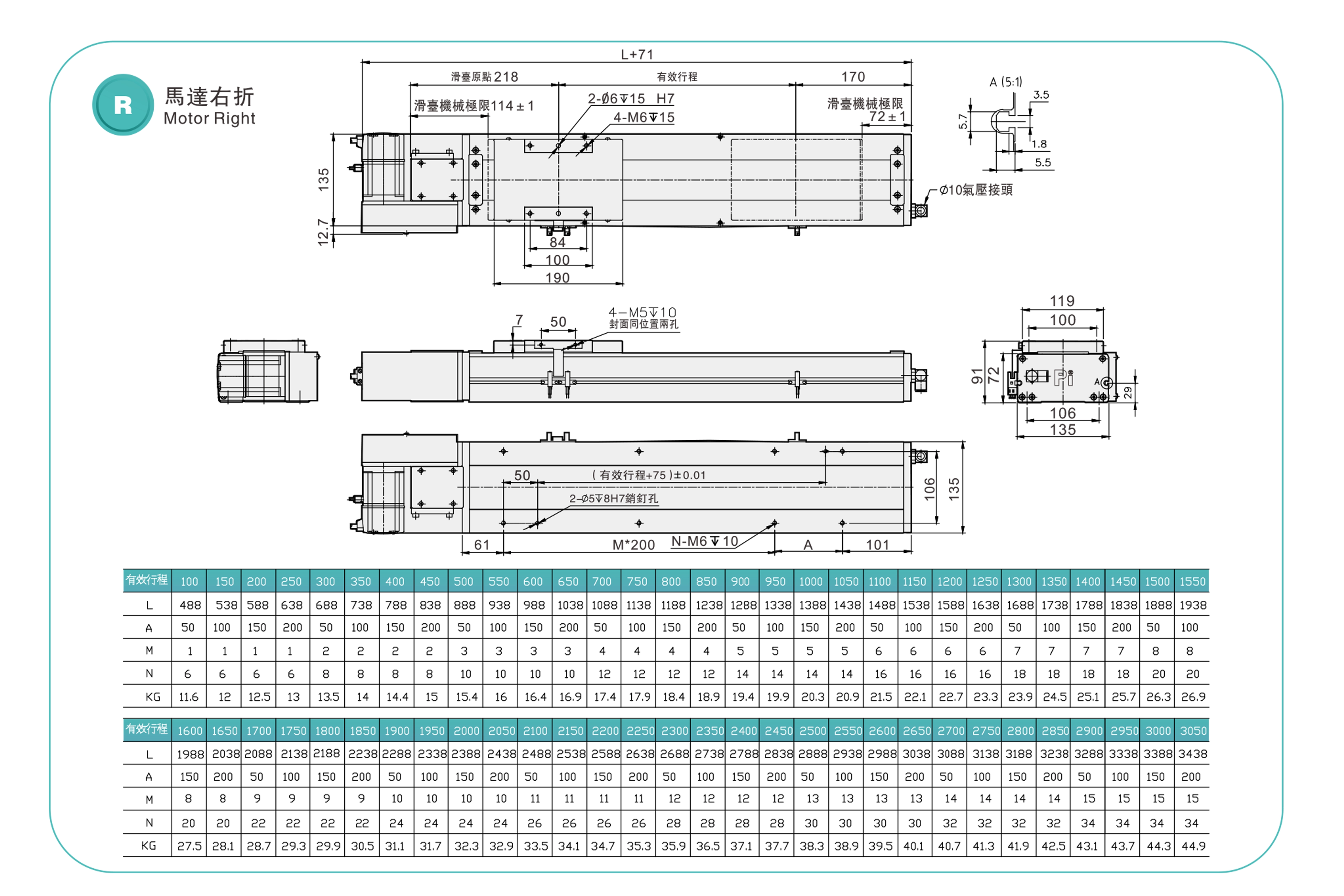
Motor oben links / Motor oben rechts










 PDF
PDF